Mistä auto tietää, missä se kulkee, ja miten kartoille on saatu kaikki paikat oikeaan paikkaan? Erilaisia paikannusmenettelyjä on käytetty pitkään, ja viime vuosien aikana niiden käyttö on valtavasti lisääntynyt. Jokainen älykännykän omistaja kantaa niitä mukanaan. Mutta millaiseen matematiikkaan ne perustuvat?
Kolmiomittausta on kartoituksessa käytetty jo pitkään. Esimerkkinä vaikkapa 1800-luvun alkupuoliskolla mitattu maailmanperintökohteisiinkin kuuluva Struven ketju, joka Suomessa ulottuu Suomenlahdelta Enontekiölle. Pohjana on kolmioverkko, jonka pisteiden koordinaattien laskeminen havaintoarvoista on trigonometriaa. Kehittelin aiheesta ylioppilastehtävän vuoden 2011 kevään lyhyen matematiikan ylioppilaskokeeseen (tehtävä 12, http://matta.hut.fi/matta/yoteht/). Malliratkaisu tosin on pikemmin analyyttistä geometriaa kuin trigonometriaa (mikä olisi laskennallisesti helpompaa eikä tarvitsisi käsitellä isoja lukuja).
 |
| Ylioppilastehtävän trigonometrinen ratkaisu: tuntemattomat $x$ ja $y$ voidaan ratkaista kahden suorakulmaisen kolmion avulla muodostetusta trigonometrisesta yhtälöryhmästä. |
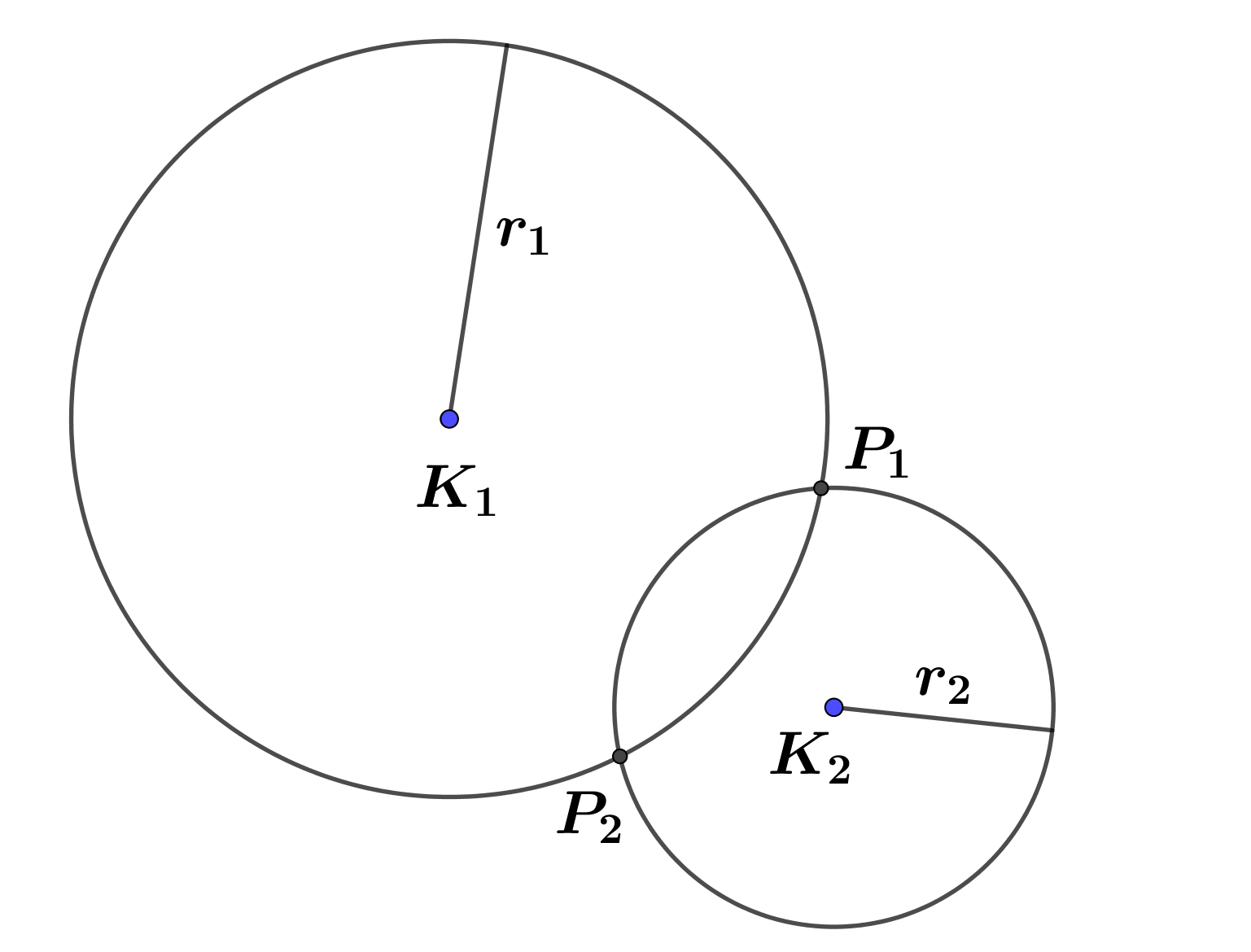
Kolmiomittauksen pohjana on sopivien kulmien mittaaminen ja sivujen pituuksien laskeminen näiden avulla. Entäpä jos meneteltäisiinkin toisin ja mitattaisiin etäisyyksiä, joiden avulla laskettaisiin uusien kärkipisteiden koordinaatit? Tämä luonnollisesti edellyttää, että tekniikka etäisyyksien mittaamiseen on olemassa. 1800-luvulla ei ollut, nykyään on. Mitataan siis etäisyydet kahdesta tunnetusta pisteestä kolmanteen pisteeseen sen sijaan, että mitattaisiin tähtäyssuuntien suuntakulmat. Tällöin saadaan kaksi ympyränkaarta, joiden leikkauspisteessä kolmas piste on.
 | |
|
Jos tunnettujen pisteiden koordinaatit ovat $(x_1,y_1)$ ja $(x_2,y_2)$ ja mitatut etäisyydet $r_1$ ja $r_2$, niin tuntemattoman pisteen koordinaateille $(x,y)$ saadaan yhtälöt \begin{align*} &(x - x_1)^2 + (y - y_1)^2 = r_1^2, \\ &(x - x_2)^2 + (y - y_2)^2 = r_2^2. \end{align*} Tämä on epälineaarinen yhtälöpari, jolla on kaksi ratkaisua. Jollakin lisäargumentilla on pääteltävä (tilanteen mukaan), kumpaa ratkaisua haetaan.
Maailma kuitenkin on kolmiulotteinen ja vaikkapa lentoliikenteessä (tai sodassa ...) tarvitaan myös korkeuskoordinaatteja. Tällöin tarvitaan kolme tunnettua pistettä, joista etäisyydet mitataan. Ympyrät korvautuvat tällöin kolmella pallolla, joiden keskipisteinä ovat tunnetut pisteet ja säteinä mitatut etäisyydet. Yhtälöryhmässä on kolme pallon yhtälöä: \begin{align*} &(x - x_1)^2 + (y - y_1)^2 + (z - z_1)^2 = r_1^2, \\ &(x - x_2)^2 + (y - y_2)^2 + (z - z_2)^2= r_2^2, \\ &(x - x_3)^2 + (y - y_3)^2 + (z - z_3)^2 = r_3^2. \end{align*} Tälläkin on kaksi ratkaisua.
Kyseessä on satelliittipaikannuksen perusidea. Tunnetut pisteet ovat satelliittien sijaintipisteet. Jokainen satelliitti lähettää signaalia, josta ilmenee sen sijainti ja tarkka kellonaika. Paikannettavassa pisteessä otetaan signaalit vastaan ja lasketaan vastaanottimen kellonajan ero signaalissa ilmoitettuun aikaan. Satelliitti kiertää yleensä noin $20\,000$ kilometrin etäisyydellä maapallon pinnasta ja signaali etenee valon nopeudella, jolloin aikaero on kymmenesosasekunnin luokkaa. Tästä voidaan laskea etäisyys (= aika $\times$ nopeus).
Laskenta edellyttää kuitenkin erittäin tarkkaa ajanmittausta. Satelliteissa on synkronoidut atomikellot, joten ne ovat aina samassa ajassa. Paikannettavassa pisteessä olevassa laitteessa ei kuitenkaan samaan tarkkuuteen ja synkronointiin päästä, vaan ajanmittaukseen sisältyy tuntematon virhetermi $e$. Ratkaisuna on neljän satelliitin käyttö kolmen sijasta. Jos $c$ on valonnopeus ja lasketut aikaerot ovat $d_i$, saadaan yhtälöryhmäksi \begin{align*} &(x - x_1)^2 + (y - y_1)^2 + (z - z_1)^2 = (c(d_1 + e))^2, \\ &(x - x_2)^2 + (y - y_2)^2 + (z - z_2)^2= (c(d_2 + e))^2, \\ &(x - x_3)^2 + (y - y_3)^2 + (z - z_3)^2 = (c(d_3 + e))^2, \\ &(x - x_4)^2 + (y - y_4)^2 + (z - z_4)^2 = (c(d_4 + e))^2. \end{align*} Tässä on neljä tuntematonta, paikannettavan pisteen koordinaatit $(x,y,z)$ ja aikaeron virhetermi $e$.
 |
| Neljän pallon leikkaus yhdessä pisteessä, kun säteet on saatu sopiviksi määrittämällä aikaeron virhetermi. Kuvio on periaatteellinen eikä liity mihinkään satelliittipaikannustilanteeseen. |
Yhtälöryhmän (nopea) ratkaiseminen ei ole aivan yksinkertaista, mutta siihen on kehitetty sekä numeerisia että algebrallisia menetelmiä. Laskenta tapahtuu vastaanottimessa (esimerkiksi autossa), joten kyseessä ei ole mikään suurtietokone. Ratkaisuja on tässäkin periaatteessa kaksi, joten oikea on tunnistettava muilla keinoin (esimerkiksi aikaeron, periaatteellisen sijainnin tai hetkeä aiemmin lasketun sijainnin avulla).
Edellä sanottu antaa vain periaatteellisen kuvan satelliittipaikannuksesta. Käytännössä siihen liittyy paljon muutakin. Jos vastaanotin esimerkiksi löytää neljää useamman satelliitin signaalit, näitä voidaan käyttää tuloksen tarkentamiseen. Koordinaattienmääritys on tällöin ylimäärätty probleema, jolla ei yleensä ole kaikki yhtälöt toteuttavaa ratkaisua, vaan haetaan ratkaisua, joka toteuttaa kaikki yhtälö mahdollisimman tarkoin (esimerkiksi ns. pienimmän neliösumman menettelyllä).
Tarkempia tietoja löytyy esimerkiksi Wikipedia-artikkeleista
https://www.maanmittauslaitos.fi/tutkimus/teematietoa/satelliittipaikannus,
https://en.wikipedia.org/wiki/Satellite_navigation,
https://en.wikipedia.org/wiki/Global_Positioning_System.
Laajasti käytettyjä satelliittipaikannusjärjestelmiä ovat seuraavat: amerikkalainen GPS (Global Positioning System), Euroopan Unionin Galileo, venäläinen GLONASS (Глобальная навигационная спутниковая система) ja kiinalainen BeiDou (北斗卫星导航系统). Usein on tapana puhua GPS-järjestelmistä, koska amerikkalainen oli ensimmäinen. Nykyään kuitenkin mieluummin käytetään lyhennettä GNSS, Global Navigation Satellite System, ja GPS tarkoittaa vain amerikkalaista järjestelmää.
Ei kommentteja:
Lähetä kommentti